
Saat ini sistem automasi semakin banyak digunakan oleh sektor industri, terutama sektor-sektor dengan jumlah permintaan pasar yang sangat tinggi. Dengan demikian proses produksi dapat berjalan setiap saat dengan tingkat akurasi yang tinggi, serta biaya yang relatif lebih murah jika dibandingkan dengan menggunakan tenaga manusia. Dengan adanya pandemik covid-19 yang terjadi saat ini dimana aktifitas yang berkaitan dengan manusia sangat terbatas, maka robot automasi lebih bisa diandalkan untuk menjaga kelangsungan proses produksi.
Menurut The Robot Report, hampir 38% pekerjaan manual di dalam industri manufaktur adalah pemindahan komponen dari satu tempat ke tempat lain dan pemasangan komponen pada mesin. Perakitan produk bisa menjadi lebih efisien jika pekerjaan tersebut dapat diautomasi.
Sedangkan untuk proses pengambilan komponen yang akan dirakit, sebagian industri manufaktur masih melakukannya secara manual menggunakan tenaga manusia. Mengambil objek (komponen) merupakan tugas yang sangat mudah bagi manusia tetapi cukup rumit bagi robot. Terlebih lagi apabila objek tersebut berada di posisi dan orientasi yang acak bersama bercampur dengan objek-objek lainnya di dalam satu peti (atau sering juga disebut sebagai bin picking task). Mengapa tugas ini sulit? Pertama, robot harus mengenali komponen mana yang harus diambil dari sekian banyak objek yang ada di dalam peti. Kemudian robot harus bisa mendeteksi dimana posisi objek tersebut relatif terhadap robot. Robot juga harus tahu dari arah mana tangan robot harus menggapai objek tersebut agar tidak terjadi tubrukan dengan objek sekitarnya. Dalam dunia akademia, proses ini disebut dengan grasp planning. Bisa dipahami, bahwa proses ini membutuhkan integrasi dari berbagai macam cabang ilmu robotika.

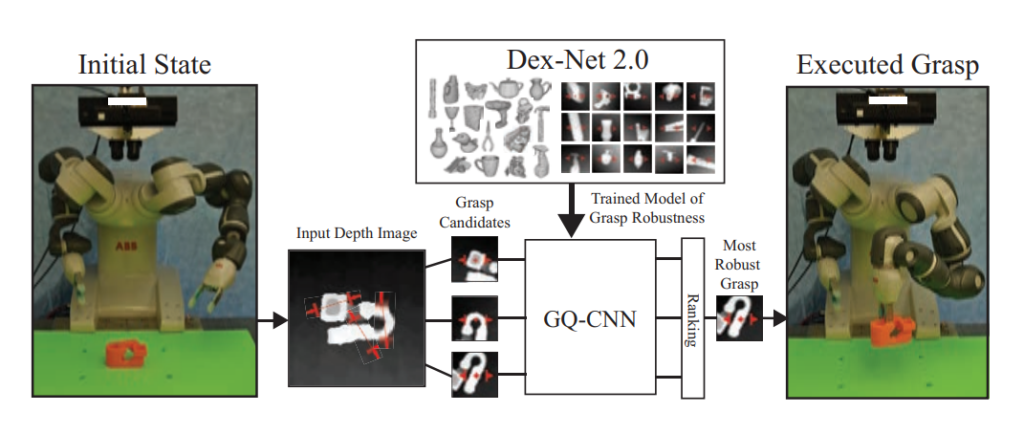
Membuat bin picking merupakan tugas yang cukup rumit. Saat ini para peneliti menggunakan deep learning untuk membuat bin picking pada robot. Deep learning memiliki kemampuan untuk mempelajari masalah input dan output yang kompleks dengan sendirinya apabila disediakan data yang cukup untuk dipelajari. Untuk aplikasi dalam bin-picking, para peneliti biasanya menggunakan neural network yand dilatih untuk memprediksi probabilitas suatu objek bisa diambil atau tidak dari gambar yang diambil oleh kamera 3 dimensi. Objek yand diambil adalah objek yang memiliki probabilitas sukses tertinggi di antara objek yang lain. Beberapa peniliti juga melatih network untuk memprediksi orientasi dari objek tersebut, sehingga robot bisa tahu dari posisi mana robot harus mengambil objek tersebut.

Untuk melatih neural network, ada berbagai cara yang digunakan oleh para peneliti. Cara yang paling mudah adalah dengan memberikan label gambar secara manual, yang kemudian gambar tersebut digunakan sebagai training data untuk melatih neural network. Namun ada juga beberapa peneliti yang menggunakan metode deep reinforcement learning, dimana robot akan langsung belajar sendiri untuk mengambil objek. Dalam algoritma ini, robot akan mendapatkan reward apabila berhasil mengambil objek dan mendapat penalti apabila gagal mengambil objek. Algoritma didesain untuk memaksimalkan reward dan meminimalkan penalti, sehingga dengan sendirinya robot akan belajar untuk mengenali objek mana yang mudah untuk diambil.
Bin picking masih mejadi topik penelitian yang aktif hingga saat ini karena penggunaan deep learning yang masih belum mampu menandingi kemampuan manusia dalam mengenali objek. Meskipun demikian, metode deep learning ini merupakan solusi yang menjanjikan untuk memecahkan masalah bin picking dimasa yang akan datang, walau masih perlu banyak hal yang harus ditingkatkan agar kemampunnya dalam mengambil objek dapat setara dengan kemampuan manusia.
Bahan bacaan:
- The Robot Report, “Is fully automated bin picking finally here?” https://www.therobotreport.com/fully-automated-bin-picking-finally-here/.
- Robotics Business Review ,“Yaskawa deep learning bin picking robot at irex 2017,” https://www.roboticsbusinessreview.com/manufacturing/deep-learningfactory-automation/attachment/yaskawa-deep-learning-bin-picking-robot-atirex-2017/.
- J. Mahler, J. Liang, S. Niyaz, M. Laskey, R. Doan, X. Liu, J. A. Ojea, and K. Goldberg, “Dex-net 2.0: Deep learning to plan robust grasps with synthetic point clouds and analytic grasp metrics,” in Robotics: Science and Systems (RSS), 2017.
- Cameron, L. “Deep Learning: Our No. 1 Tech Trend for 2018 is Set to Revolutionize Industrial Robotics,” https://www.computer.org/publications/tech-news/research/competitions-industry-partnerships-deep-learning-will-usher-new-era-industrial-robotics/.
- J. Mahler, M. Matl, V. Satish, M. Danielczuk, B. DeRose, S. McKinley, and K. Goldberg, “Learning ambidextrous robot grasping policies,” Science Robotics, vol. 4, no. 26, p. eaau4984, 2019.
- S. Levine, P. Pastor, A. Krizhevsky, J. Ibarz, and D. Quillen, “Learning handeye coordination for robotic grasping with deep learning and large-scale data collection,” The International Journal of Robotics Research, vol. 37, no. 4-5, pp. 421–436, 2018.
- L. Pinto and A. Gupta, “Supersizing self-supervision: Learning to grasp from 50k tries and 700 robot hours,” in 2016 IEEE International Conference on Robotics and Automation (ICRA), 2016, pp. 3406–3413.
Penulis:
Adam Syammas Zaki, mahasiswa S-2 di Department of Robotics, Tohoku University, Jepang.
Kontak: adamsyammaszaki(at)gmail(dot)com


